Patents
US Patent pending: Filed in August 2013, patent application titled: Distance Based Modelling and Manipulation Methods for Augmented Reality Systems using Ultrasonic Gloves, – a glove-based interaction device for modelling and manipulation for augmented reality and wearable systems. http://www.google.com/patents/US20140125577
Publication
 Thuong Hoang, Ross Smith, Bruce Thomas, “Ultrasonic Glove Input Device for Distance-based Interactions”, in Proceedings of the 23rd International Conference on Artificial Reality and Telexistence, Tokyo, Japan 2013.
Thuong Hoang, Ross Smith, Bruce Thomas, “Ultrasonic Glove Input Device for Distance-based Interactions”, in Proceedings of the 23rd International Conference on Artificial Reality and Telexistence, Tokyo, Japan 2013.
[pdf]
 Thuong Hoang, Bruce Thomas, “Distance-Based Modeling and Manipulation Techniques Using Ultrasonic Gloves”, in International Symposium on Mixed and Augmented Reality , Atlanta, USA 2012.
Thuong Hoang, Bruce Thomas, “Distance-Based Modeling and Manipulation Techniques Using Ultrasonic Gloves”, in International Symposium on Mixed and Augmented Reality , Atlanta, USA 2012.
Description
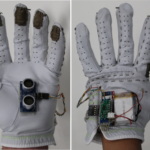
We present a set of distance-based interaction techniques for modeling and manipulation, enabled by a new input device called the ultrasonic gloves. The ultrasonic gloves are built upon the original design of the pinch glove device for virtual reality systems with a tilt sensor and a pair of ultrasonic transducers in the palms of the gloves. The transducers are distance-ranging sensors that allow the user to specify a range of distances by natural gestures such as facing the palms towards each other or towards other surfaces. The user is able to create virtual models of physical objects by specifying their dimensions with hand gestures. We combine the reported distance with the tilt orientation data to construct virtual models. We also map the distance data to create a set of affine transformation techniques, including relative and fixed scaling, translation, and rotation. Our techniques can be generalized to different sensor technologies.